| STM32CubeMX+FATFS+FREERTOS实现W25Q256虚拟U盘 | 您所在的位置:网站首页 › page count清零 › STM32CubeMX+FATFS+FREERTOS实现W25Q256虚拟U盘 |
STM32CubeMX+FATFS+FREERTOS实现W25Q256虚拟U盘
|
一、软件硬件说明
软件:STM32CubeMX V6.6.1 /KEIL5 V5.29 硬件:正点原子阿波罗开发板,核心板STM32F429IGT6(176脚) 使用USB_SLAVE接口连接电脑USB,从而读取W25Q256里的文件 W25Q256:SPI5接口 
 二、STM32CubeMX配置
二、STM32CubeMX配置
RCC配置 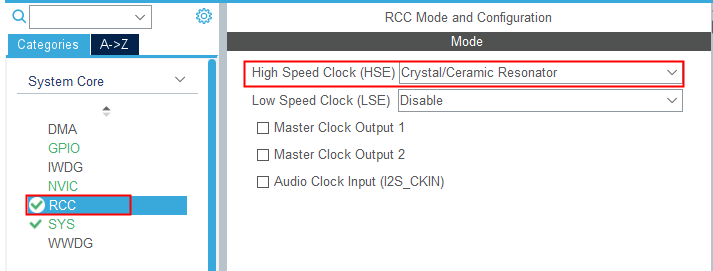
SYS配置,选择SW方式,因为要用到FREERTOS,时钟源选TIM7,其他定时器也可以。 
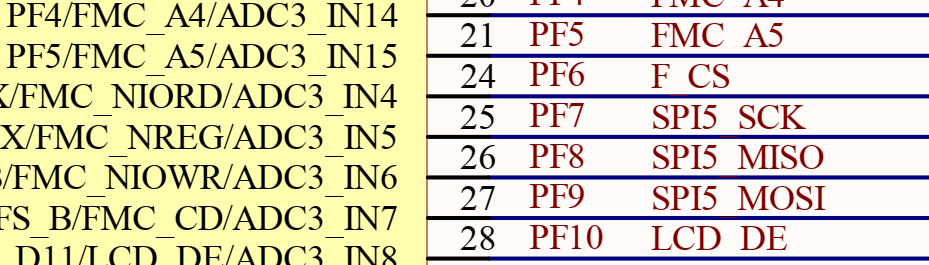
GPIO配置,PB0和PB1控制两个LED灯,用来指示程序运行;PF6为SPI5的CS引脚,初始化时拉高,即不选中。 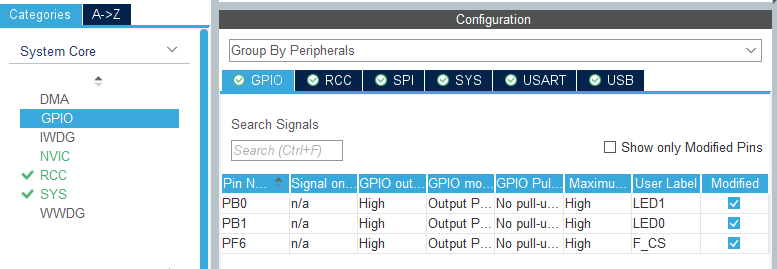
USART1配置,方便输出调试信息,参数默认 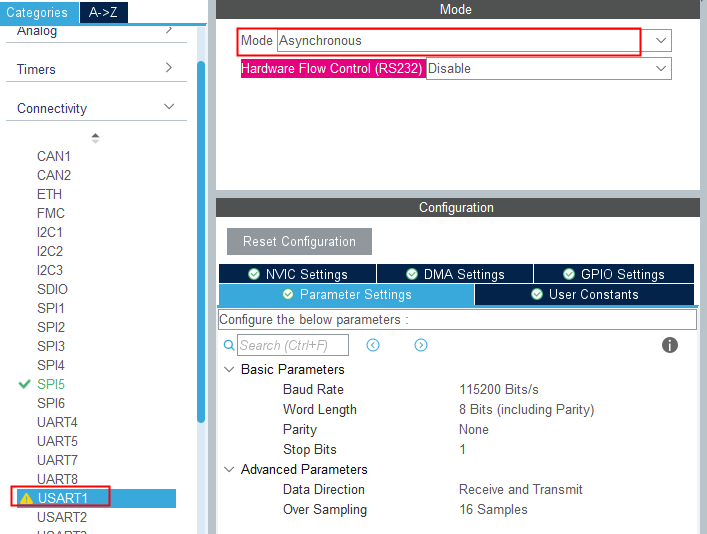
SPI5配置,刚开始速度配置低一点,256分频。W25Q256可以使用模式0(CPOL =0 CPOA=0 ) 或者模式3(CPOL=1 CPOA=1),这里配置为模式0。模式3可自行测试。 
USB_OTG_FS配置,参数默认 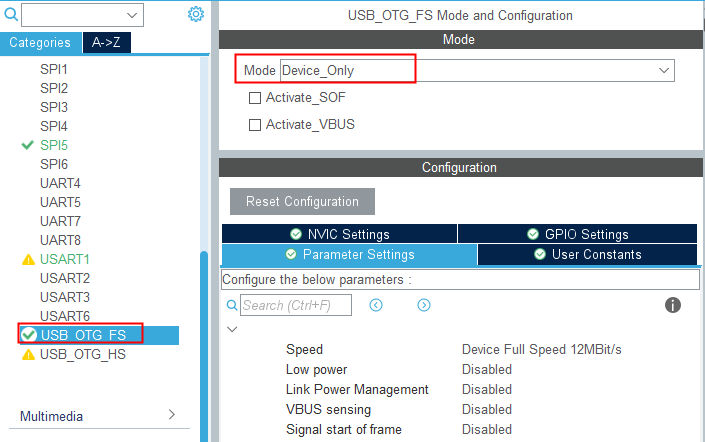
USB_Device配置,MSC_MEDIA_PACKET参数改为4096 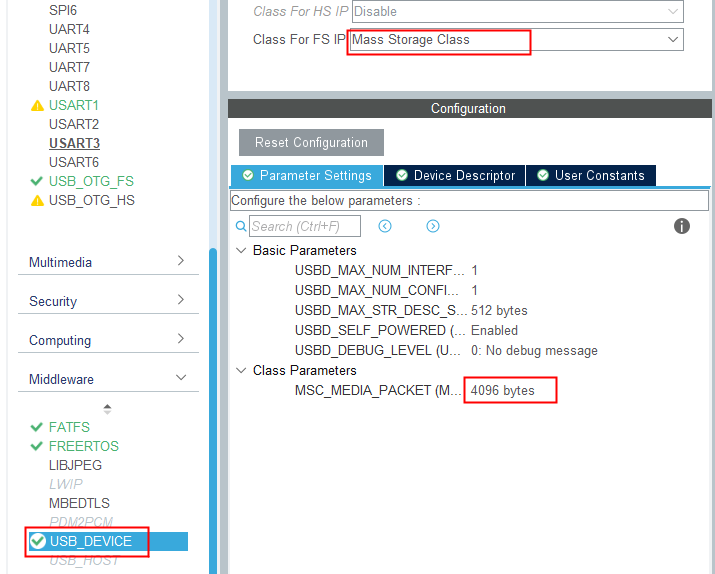
FREERTOS配置,将默认任务的堆栈大小改为1024 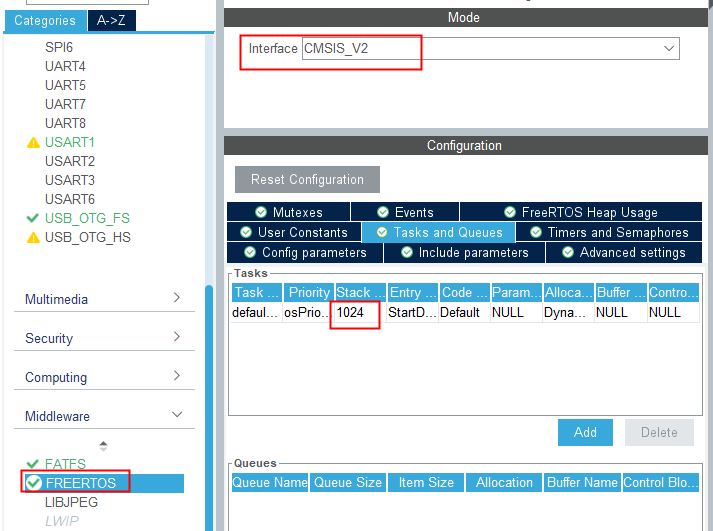
FATFS配置,修改如下 
时钟配置,外部晶振为25MHz,时钟配置为168MHz 
工程配置,堆栈设置大一些 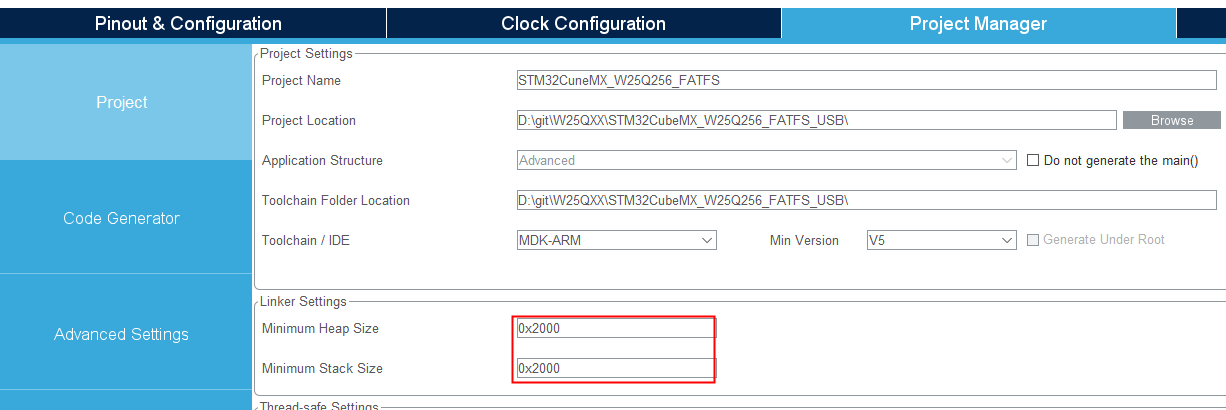

生成代码,点击GENERATE CODE,生成基础代码  三、代码说明
三、代码说明
串口重映射 usart.c /* USER CODE BEGIN Header */ /** ****************************************************************************** * @file usart.c * @brief This file provides code for the configuration * of the USART instances. ****************************************************************************** * @attention * * Copyright (c) 2023 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "usart.h" /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ UART_HandleTypeDef huart1; /* USART1 init function */ void MX_USART1_UART_Init(void) { /* USER CODE BEGIN USART1_Init 0 */ /* USER CODE END USART1_Init 0 */ /* USER CODE BEGIN USART1_Init 1 */ /* USER CODE END USART1_Init 1 */ huart1.Instance = USART1; huart1.Init.BaudRate = 115200; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; if (HAL_UART_Init(&huart1) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN USART1_Init 2 */ /* USER CODE END USART1_Init 2 */ } void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle) { GPIO_InitTypeDef GPIO_InitStruct = {0}; if(uartHandle->Instance==USART1) { /* USER CODE BEGIN USART1_MspInit 0 */ /* USER CODE END USART1_MspInit 0 */ /* USART1 clock enable */ __HAL_RCC_USART1_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /**USART1 GPIO Configuration PA9 ------> USART1_TX PA10 ------> USART1_RX */ GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; GPIO_InitStruct.Alternate = GPIO_AF7_USART1; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); /* USER CODE BEGIN USART1_MspInit 1 */ /* USER CODE END USART1_MspInit 1 */ } } void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle) { if(uartHandle->Instance==USART1) { /* USER CODE BEGIN USART1_MspDeInit 0 */ /* USER CODE END USART1_MspDeInit 0 */ /* Peripheral clock disable */ __HAL_RCC_USART1_CLK_DISABLE(); /**USART1 GPIO Configuration PA9 ------> USART1_TX PA10 ------> USART1_RX */ HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10); /* USER CODE BEGIN USART1_MspDeInit 1 */ /* USER CODE END USART1_MspDeInit 1 */ } } /* USER CODE BEGIN 1 */ #include "stdio.h" //加入以下代码,支持printf函数 #pragma import(__use_no_semihosting) //标准库需要的支持函数 struct __FILE { int handle; }; FILE __stdout; //定义_sys_exit()以避免使用半主机模式 void _sys_exit(int x) { x = x; } //重定义fputc函数 int fputc(int ch, FILE *f) { while((USART1->SR&0X40)==0);//循环发送,直到发送完毕 USART1->DR = (int) ch; return ch; } /* USER CODE END 1 */w25qxx.c #include "w25qxx.h" #include "spi.h" u16 W25QXX_TYPE=W25Q256; //默认是W25Q256 //4Kbytes为一个Sector //16个sector为1个Block //W25Q256 //容量为32M字节,共有512个Block,8192个Sector //SPI速度设置函数 //SPI速度=fAPB1/分频系数 //@ref SPI_BaudRate_Prescaler:SPI_BAUDRATEPRESCALER_2~SPI_BAUDRATEPRESCALER_2 256 //fAPB1时钟一般为45Mhz: void SPI5_SetSpeed(u8 SPI_BaudRatePrescaler) { assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));//判断有效性 __HAL_SPI_DISABLE(&hspi5); //关闭SPI hspi5.Instance->CR1&=0XFFC7; //位3-5清零,用来设置波特率 hspi5.Instance->CR1|=SPI_BaudRatePrescaler;//设置SPI速度 __HAL_SPI_ENABLE(&hspi5); //使能SPI } //SPI5 读写一个字节 //TxData:要写入的字节 //返回值:读取到的字节 u8 SPI5_ReadWriteByte(u8 TxData) { u8 Rxdata; HAL_SPI_TransmitReceive(&hspi5,&TxData,&Rxdata,1, 1000); return Rxdata; //返回收到的数据 } //初始化SPI FLASH的IO口 void W25QXX_Init(void) { u8 temp; GPIO_InitTypeDef GPIO_Initure; __HAL_RCC_GPIOF_CLK_ENABLE(); //使能GPIOF时钟 //PF6 GPIO_Initure.Pin=GPIO_PIN_6; //PF6 GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出 GPIO_Initure.Pull=GPIO_PULLUP; //上拉 GPIO_Initure.Speed=GPIO_SPEED_FAST; //快速 HAL_GPIO_Init(GPIOF,&GPIO_Initure); //初始化 W25QXX_CS=1; //SPI FLASH不选中 SPI5_SetSpeed(SPI_BAUDRATEPRESCALER_2); //设置为45M时钟,高速模式 W25QXX_TYPE=W25QXX_ReadID(); //读取FLASH ID. if(W25QXX_TYPE==W25Q256) //SPI FLASH为W25Q256 { temp=W25QXX_ReadSR(3); //读取状态寄存器3,判断地址模式 if((temp&0X01)==0) //如果不是4字节地址模式,则进入4字节地址模式 { W25QXX_CS=0; //选中 SPI5_ReadWriteByte(W25X_Enable4ByteAddr);//发送进入4字节地址模式指令 W25QXX_CS=1; //取消片选 } } } //读取W25QXX的状态寄存器,W25QXX一共有3个状态寄存器 //状态寄存器1: //BIT7 6 5 4 3 2 1 0 //SPR RV TB BP2 BP1 BP0 WEL BUSY //SPR:默认0,状态寄存器保护位,配合WP使用 //TB,BP2,BP1,BP0:FLASH区域写保护设置 //WEL:写使能锁定 //BUSY:忙标记位(1,忙;0,空闲) //默认:0x00 //状态寄存器2: //BIT7 6 5 4 3 2 1 0 //SUS CMP LB3 LB2 LB1 (R) QE SRP1 //状态寄存器3: //BIT7 6 5 4 3 2 1 0 //HOLD/RST DRV1 DRV0 (R) (R) WPS ADP ADS //regno:状态寄存器号,范:1~3 //返回值:状态寄存器值 u8 W25QXX_ReadSR(u8 regno) { u8 byte=0,command=0; switch(regno) { case 1: command=W25X_ReadStatusReg1; //读状态寄存器1指令 break; case 2: command=W25X_ReadStatusReg2; //读状态寄存器2指令 break; case 3: command=W25X_ReadStatusReg3; //读状态寄存器3指令 break; default: command=W25X_ReadStatusReg1; break; } W25QXX_CS=0; //使能器件 SPI5_ReadWriteByte(command); //发送读取状态寄存器命令 byte=SPI5_ReadWriteByte(0Xff); //读取一个字节 W25QXX_CS=1; //取消片选 return byte; } //写W25QXX状态寄存器 void W25QXX_Write_SR(u8 regno,u8 sr) { u8 command=0; switch(regno) { case 1: command=W25X_WriteStatusReg1; //写状态寄存器1指令 break; case 2: command=W25X_WriteStatusReg2; //写状态寄存器2指令 break; case 3: command=W25X_WriteStatusReg3; //写状态寄存器3指令 break; default: command=W25X_WriteStatusReg1; break; } W25QXX_CS=0; //使能器件 SPI5_ReadWriteByte(command); //发送写取状态寄存器命令 SPI5_ReadWriteByte(sr); //写入一个字节 W25QXX_CS=1; //取消片选 } //W25QXX写使能 //将WEL置位 void W25QXX_Write_Enable(void) { W25QXX_CS=0; //使能器件 SPI5_ReadWriteByte(W25X_WriteEnable); //发送写使能 W25QXX_CS=1; //取消片选 } //W25QXX写禁止 //将WEL清零 void W25QXX_Write_Disable(void) { W25QXX_CS=0; //使能器件 SPI5_ReadWriteByte(W25X_WriteDisable); //发送写禁止指令 W25QXX_CS=1; //取消片选 } //读取芯片ID //返回值如下: //0XEF13,表示芯片型号为W25Q80 //0XEF14,表示芯片型号为W25Q16 //0XEF15,表示芯片型号为W25Q32 //0XEF16,表示芯片型号为W25Q64 //0XEF17,表示芯片型号为W25Q128 //0XEF18,表示芯片型号为W25Q256 u16 W25QXX_ReadID(void) { u16 Temp = 0; W25QXX_CS=0; SPI5_ReadWriteByte(0x90);//发送读取ID命令 SPI5_ReadWriteByte(0x00); SPI5_ReadWriteByte(0x00); SPI5_ReadWriteByte(0x00); Temp|=SPI5_ReadWriteByte(0xFF)24)); } SPI5_ReadWriteByte((u8)((ReadAddr)>>16)); //发送24bit地址 SPI5_ReadWriteByte((u8)((ReadAddr)>>8)); SPI5_ReadWriteByte((u8)ReadAddr); for(i=0;i>24)); } SPI5_ReadWriteByte((u8)((WriteAddr)>>16)); //发送24bit地址 SPI5_ReadWriteByte((u8)((WriteAddr)>>8)); SPI5_ReadWriteByte((u8)WriteAddr); for(i=0;i256)pageremain=256; //一次可以写入256个字节 else pageremain=NumByteToWrite; //不够256个字节了 } }; } //写SPI FLASH //在指定地址开始写入指定长度的数据 //该函数带擦除操作! //pBuffer:数据存储区 //WriteAddr:开始写入的地址(24bit) //NumByteToWrite:要写入的字节数(最大65535) u8 W25QXX_BUFFER[4096]; void W25QXX_Write(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite) { u32 secpos; u16 secoff; u16 secremain; u16 i; u8 * W25QXX_BUF; W25QXX_BUF=W25QXX_BUFFER; secpos=WriteAddr/4096;//扇区地址 secoff=WriteAddr%4096;//在扇区内的偏移 secremain=4096-secoff;//扇区剩余空间大小 //printf("ad:%X,nb:%X\r\n",WriteAddr,NumByteToWrite);//测试用 if(NumByteToWrite>16)); //发送24bit地址 SPI5_ReadWriteByte((u8)((Dst_Addr)>>8)); SPI5_ReadWriteByte((u8)Dst_Addr); W25QXX_CS=1; //取消片选 W25QXX_Wait_Busy(); //等待擦除完成 } //等待空闲 void W25QXX_Wait_Busy(void) { while((W25QXX_ReadSR(1)&0x01)==0x01); // 等待BUSY位清空 } //进入掉电模式 void W25QXX_PowerDown(void) { W25QXX_CS=0; //使能器件 SPI5_ReadWriteByte(W25X_PowerDown); //发送掉电命令 W25QXX_CS=1; //取消片选 HAL_Delay(3); //等待TPD } //唤醒 void W25QXX_WAKEUP(void) { W25QXX_CS=0; //使能器件 SPI5_ReadWriteByte(W25X_ReleasePowerDown); // send W25X_PowerDown command 0xAB W25QXX_CS=1; //取消片选 HAL_Delay(3); //等待TRES1 }w25qxx.h #ifndef __W25QXX_H #define __W25QXX_H #include "main.h" //W25X系列/Q系列芯片列表 #define W25Q80 0XEF13 #define W25Q16 0XEF14 #define W25Q32 0XEF15 #define W25Q64 0XEF16 #define W25Q128 0XEF17 #define W25Q256 0XEF18 extern u16 W25QXX_TYPE; //定义W25QXX芯片型号 #define W25QXX_CS PFout(6) //W25QXX的片选信号 // //指令表 #define W25X_WriteEnable 0x06 #define W25X_WriteDisable 0x04 #define W25X_ReadStatusReg1 0x05 #define W25X_ReadStatusReg2 0x35 #define W25X_ReadStatusReg3 0x15 #define W25X_WriteStatusReg1 0x01 #define W25X_WriteStatusReg2 0x31 #define W25X_WriteStatusReg3 0x11 #define W25X_ReadData 0x03 #define W25X_FastReadData 0x0B #define W25X_FastReadDual 0x3B #define W25X_PageProgram 0x02 #define W25X_BlockErase 0xD8 #define W25X_SectorErase 0x20 #define W25X_ChipErase 0xC7 #define W25X_PowerDown 0xB9 #define W25X_ReleasePowerDown 0xAB #define W25X_DeviceID 0xAB #define W25X_ManufactDeviceID 0x90 #define W25X_JedecDeviceID 0x9F #define W25X_Enable4ByteAddr 0xB7 #define W25X_Exit4ByteAddr 0xE9 void W25QXX_Init(void); u16 W25QXX_ReadID(void); //读取FLASH ID u8 W25QXX_ReadSR(u8 regno); //读取状态寄存器 void W25QXX_4ByteAddr_Enable(void); //使能4字节地址模式 void W25QXX_Write_SR(u8 regno,u8 sr); //写状态寄存器 void W25QXX_Write_Enable(void); //写使能 void W25QXX_Write_Disable(void); //写保护 void W25QXX_Write_NoCheck(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite); void W25QXX_Read(u8* pBuffer,u32 ReadAddr,u16 NumByteToRead); //读取flash void W25QXX_Write(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite);//写入flash void W25QXX_Erase_Chip(void); //整片擦除 void W25QXX_Erase_Sector(u32 Dst_Addr); //扇区擦除 void W25QXX_Wait_Busy(void); //等待空闲 void W25QXX_PowerDown(void); //进入掉电模式 void W25QXX_WAKEUP(void); //唤醒 #endifmain.c /* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * Copyright (c) 2023 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "cmsis_os.h" #include "fatfs.h" #include "spi.h" #include "usart.h" #include "usb_device.h" #include "gpio.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ #include "w25qxx.h" #include "stdio.h" #include "user_diskio.h" /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ //要写入到W25Q16的字符串数组 const uint8_t TEXT_Buffer[]= {"STM32CubeMX FATFS W25Q256 Test"}; #define SIZE sizeof(TEXT_Buffer) uint8_t datatemp[SIZE]; /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); void MX_FREERTOS_Init(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_SPI5_Init(); MX_USART1_UART_Init(); MX_FATFS_Init(); /* USER CODE BEGIN 2 */ W25QXX_Init();//W25QXX初始化 // W25QXX_Write((u8*)TEXT_Buffer,0,SIZE); // HAL_Delay(100); // W25QXX_Read(datatemp,0,SIZE); // printf("read data:\r\n"); // printf("%s\r\n",datatemp); FatfsTest(); /* USER CODE END 2 */ /* Init scheduler */ osKernelInitialize(); /* Call init function for freertos objects (in freertos.c) */ MX_FREERTOS_Init(); /* Start scheduler */ osKernelStart(); /* We should never get here as control is now taken by the scheduler */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_0|GPIO_PIN_1); HAL_Delay(500); } /* USER CODE END 3 */ } /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Configure the main internal regulator output voltage */ __HAL_RCC_PWR_CLK_ENABLE(); __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLM = 25; RCC_OscInitStruct.PLL.PLLN = 336; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; RCC_OscInitStruct.PLL.PLLQ = 7; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK) { Error_Handler(); } } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ /** * @brief Period elapsed callback in non blocking mode * @note This function is called when TIM7 interrupt took place, inside * HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment * a global variable "uwTick" used as application time base. * @param htim : TIM handle * @retval None */ void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { /* USER CODE BEGIN Callback 0 */ /* USER CODE END Callback 0 */ if (htim->Instance == TIM7) { HAL_IncTick(); } /* USER CODE BEGIN Callback 1 */ /* USER CODE END Callback 1 */ } /** * @brief This function is executed in case of error occurrence. * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ __disable_irq(); while (1) { } /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t *file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */main.h /* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.h * @brief : Header for main.c file. * This file contains the common defines of the application. ****************************************************************************** * @attention * * Copyright (c) 2023 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */ /* USER CODE END Header */ /* Define to prevent recursive inclusion -------------------------------------*/ #ifndef __MAIN_H #define __MAIN_H #ifdef __cplusplus extern "C" { #endif /* Includes ------------------------------------------------------------------*/ #include "stm32f4xx_hal.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Exported types ------------------------------------------------------------*/ /* USER CODE BEGIN ET */ /* USER CODE END ET */ /* Exported constants --------------------------------------------------------*/ /* USER CODE BEGIN EC */ /* USER CODE END EC */ /* Exported macro ------------------------------------------------------------*/ /* USER CODE BEGIN EM */ /* USER CODE END EM */ /* Exported functions prototypes ---------------------------------------------*/ void Error_Handler(void); /* USER CODE BEGIN EFP */ /* USER CODE END EFP */ /* Private defines -----------------------------------------------------------*/ #define F_CS_Pin GPIO_PIN_6 #define F_CS_GPIO_Port GPIOF #define LED1_Pin GPIO_PIN_0 #define LED1_GPIO_Port GPIOB #define LED0_Pin GPIO_PIN_1 #define LED0_GPIO_Port GPIOB /* USER CODE BEGIN Private defines */ /// //定义一些常用的数据类型短关键字 typedef int32_t s32; typedef int16_t s16; typedef int8_t s8; typedef const int32_t sc32; typedef const int16_t sc16; typedef const int8_t sc8; typedef __IO int32_t vs32; typedef __IO int16_t vs16; typedef __IO int8_t vs8; typedef __I int32_t vsc32; typedef __I int16_t vsc16; typedef __I int8_t vsc8; typedef uint32_t u32; typedef uint16_t u16; typedef uint8_t u8; typedef const uint32_t uc32; typedef const uint16_t uc16; typedef const uint8_t uc8; typedef __IO uint32_t vu32; typedef __IO uint16_t vu16; typedef __IO uint8_t vu8; typedef __I uint32_t vuc32; typedef __I uint16_t vuc16; typedef __I uint8_t vuc8; //位带操作,实现51类似的GPIO控制功能 //具体实现思想,参考第五章(87页~92页).M4同M3类似,只是寄存器地址变了. //IO口操作宏定义 #define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF) |
【本文地址】
公司简介
联系我们